
Manufacturing companies believe that optimising internal logistics operations is an important lever for maintaining competitiveness. In a series of blogs, we take a closer look at the different challenges and potential solutions, AGVs in particular. In order to provide a framework for driverless automated industrial trucks, the brand new ISO 3691-4:2023 standard details the necessary requirements to guarantee operator safety.
Before embarking on a detailed study of standards relating to AGVs, AMRs and mobile handlers, we present an overview of pertinent documents for standardising mobile robot applications.

The Machinery Directive is at the forefront of all documents and is, therefore, the most important regulation for protecting individual safety. The key aim of the Machinery Directive is to guarantee an equivalent level of security for machines that are marketed or brought into use in all European member states, and to enable their free circulation throughout the European Union. In order of importance, we then find international ISO and IEC standards. ISO standards are classified by type, A, B and C. Type A comprises basic safety standards including general aspects and design principles; type B concerns generic safety standards covering aspects applicable to a vast range of machines, whereas type C covers safety standards detailing requirements for particular machines. Standards with an asterisk are harmonised with the Machinery Directive. This means that, by applying a harmonised standard, a developed product/application is presumed to conform to pertinent legislation. Finally, there are recommended guidelines and technical specifications (TS) that reflect the technological state of the art in the field; however, they are not mandatory.
Nota : EN ISO3691-4 is harmonized under Machinery Directive since 2024
Standards for wheeled mobile robots
Regulations pertaining to the use of AGVs is clearly governed by the Machinery Directive 2006/42/CE, at national and European level. It obliges machine or facility manufacturers to conduct risk assessment (as per the EN ISO 12100:2010 standard) and, if necessary, to take measures aimed at reducing risks for operators.
Over and above the directive on machinery, national and international standards also apply. Up to recently, the EN 1525:1997 (Safety of industrial trucks - Driverless trucks and their systems) standard was the leading one regarding AGVs. The problem with this standard was that it no longer matched current technologies in the field (published in 1997) and was not harmonised in line with the Machinery Directive. The most applicable standard to replace EN 1525 with regard to AGVs is currently the ISO 3691-4:2023 standard ‘Industrial trucks - Safety requirements and verification’ - Part 4: Driverless industrial trucks and their systems. According to ISO 3691, a driverless industrial truck is ‘a powered truck, (including guided carts), which is designed to operate automatically, and the operating safety of which does not depend on an operator’. Remotely controlled trucks are not considered to be driverless trucks. Examples of driverless trucks (as defined in ISO 5053-1: 2020) can also be described as ‘automated guided vehicles’, ‘autonomous mobile robots’, ‘bots’, ‘automated guided carts’, etc.
The ISO 3691 series covers basic safety requirements for industrial trucks. Part 4 specifies these requirements as a type C standard, as per EN ISO 12100, for driverless industrial trucks, and is perfectly in line with the ISO 13849 standard. The ISO 3691-4 standard has been harmonised with the Machinery Directive 2006/42 in may 2024, hence setting forth minimum requirements for AGVs.
The ISO 3691-4 standard describes key aspects for a safe AGV: - environment within which it is used (i.e. the definition of the different zones where the vehicle operates and interacts with humans), - associated risks and dangers, and - the correct implementation of safety systems (protection).

In the Machinery Directive (2006/42/CE), the AGV is a quasi-machine: a unit that is almost a machine, but that cannot conduct a defined application alone.
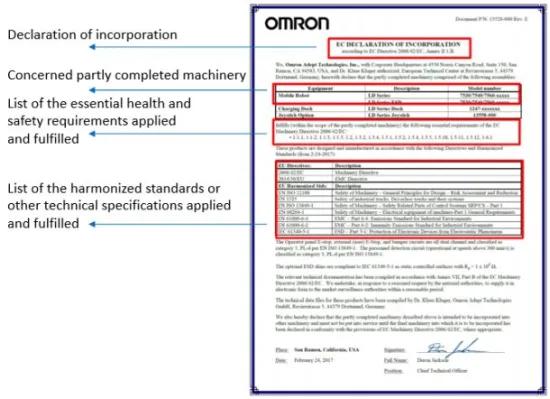
A user may presume that an AGV with CE marking is safe and satisfies all pertinent standards, since it was designed and manufactured as per the Machinery Directive (MD). This means that, if the AGV is used as described in the manual and that an accident occurs, the manufacturer, rather than the client, can be held responsible for the said accident. The declaration of incorporation delivered for each AGV must specify to which AGV directives and standards it conforms.
Over and above the design and manufacturing of a safe AGV, the manufacturer must also supply adequate documentation, in particular instructions for bringing the AGV into service within a system of mobile robots, instructions for use and operation and maintenance of the AGV, and a list of identified residual risks for the AGV.
It should be noted that CE marking only covers the AGV itself, and not the AGV system as a whole. When the mobile robot is ready to be installed, the responsibility of the safe work site is incumbent upon whoever integrates the AGV system. This can be a final user if the latter personally integrates the mobile robot.
The person integrating the AGV must ensure complete installation (top integrated on the mobile platform, loaders, etc.) and that all risks are dealt with or identified, whilst providing adequate information on operation. This includes measurement of security distances, the preparation of training plans for employees, marking of AGV itineraries, etc. Should the mobile robot be brought into service outside the scope of the AGV manufacturer’s limits, the integrator (or final user) must integrate further protection to guarantee that safety standards are abided by for the application as a whole. The integrator must therefore specify the intended use and limits of the AGV system, and conduct risk assessment for the AGV system, taking into account the specifications, intended use and limits of the employed AGV.
When the application passes from an AGV to an AGV system, the integrator must apply CE marking (declaration of conformity) on the AGV system, based on the new intended use, and must supply documentation that includes instructions for use and operation and the maintenance required for the AGV system, together with a list of identified residual risks, based on the risk assessment conducted for the AGV system.
In most cases, neither clients nor integrators appear to be aware of this - and this is consequently not done. The recent ISO 3691-4 safety standard clearly specifies integrator responsibilities. This point has often been neglected because it was ‘hidden’ in an appendix of the EN 1525 safety standard.
Once the AGV system has been deployed, the final user becomes responsible for the implementation and abidance by operating and maintenance procedures. The final user must ensure that the intended use and limits are respected, and must implement inspection and maintenance procedures for the AGV system, including warnings and markings. The final user must define safe operating procedures for operators and must define training needs for operators, other staff members and visitors.
Standards for mobile manipulators

HelMo by Staubli
For mobile manipulators, which are a combination of a mobile platform and a robotised arm, different standards should be applied, based on the status of the robotic arm:
Case 1: Robotic arm inactive, when the AGV is moving
The robotic arm can be considered as a load and risk assessment for the robotic arm + AGV combined shall be conducted as per ISO 3691-4 recommendations. The clear definition of a safe position for transporting the robot is a critical aspect. When the AGV is stationary and the robotic arm is operating, ‘robot’ standards must then be applied.
Case 2: The robot arm is conducting assembly or processing operations whilst the AGV is moving
All ‘robot’ standards are applicable to define safe application. The entire application, i.e. the mobile platform, the robot arm and the environment (routes and work zones), must therefore be evaluated in accordance with part 2 of the EN ISO 10218 standard, covering the applicative integration of industrial robots.
The EN ISO 10218-1 and -2 standards are currently under revision for they no longer reflect the state of the art of present technology. A new version of the ISO 10218-1 and ISO 10218-2 standards will be published in 2024. Not only is there no mention of collaborative robots in FDIS 10218-2 (this was not the case in ISO10218-2:2011 either), but now not even collaborative mode or collaborative operation. Collaborative is considered to be something that can only be the result of designing a collaborative application and not something of the device or the modes of the device.


 in a production environment")
 in a production environment | AGVsim project")